指示矩阵的线性回归¶
1 指示变量相应矩阵¶
-
有个类别,则会有个指示变量, 可以得到指示变量相应矩阵, 由01组成
-
可以对的每一列用线性回归做拟合,得到
-
其中
2 分类准则¶
- 因此对于输入, 可以如此分类
- 步骤
- 计算, 得到维向量
- 采用值最大组
-
该方法可以把回归看作条件期望的估计
- 可以证明, (TODO)
- 但是由于线性回归的刚性本质 (ridge nature) ,特别是如果我们在训练数据之外做预测时,困难出现是负数或者大于1
-
更合理的方法是采用目标值去理解
-
对于的第行,采用编码方法,如果是第类则为
-
通过最小二乘法来拟合线性模型, 这个准则是目标值到拟合向量的欧几里得距离的平方和(分别表示的第行)
-
对于新的观测值,只需要使得它的拟合向量到最近的目标值作为其类别
-
平方和准则恰巧是多重响应变量线性回归 准则
- 多重响应变量线性回归损失函数可以变为欧几里得距离的平方和
-
同时,该目标分类准则,和上面是一致的
3 掩盖问题¶
-
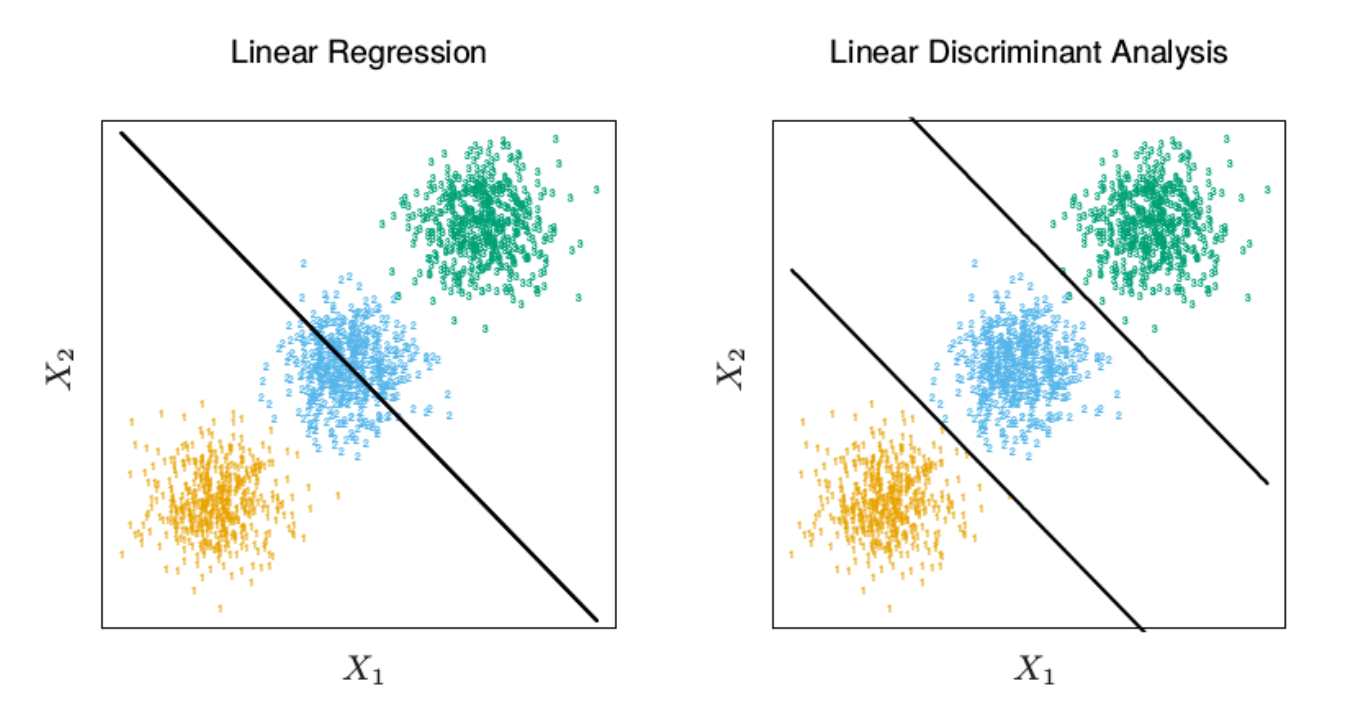
描述:类别的数目 时候回归方法有个很严重的问题,特别当 很大时, 由于回归模型的刚性性质,某个类别可以被其他的类别掩盖掉 (masked)
-
左图显示了通过对指示响应变量的线性回归找到的边界,中间的类别完全被掩盖掉了;右侧图显示了通过线性判别分析找到的边界
-
原因:
-
将三种数据的中心进行连线,并且将数据进行投影。下图显示了其指示变量(列)的值
-

到横轴的投影称为rug plot, 也就是在坐标轴上标出元素出现的频数,出现一次就会话一个小竖。其中横轴表示了(或者),纵轴表示横轴所对应的投影连线上的对应的指示变量的值
-
左侧是指示矩阵线性回归进行拟合的,也就是 例如,蓝色的数据点由于只有中间的数据, 两侧的均为0,又因为随着坐标是线性变化的,所以只能是个直线,且为了达到最小,斜率接近于0且值大概在处
-
右侧是指示矩阵二次回归进行拟合的,即 由于这里公式是二次拟合,所以在投影方向的也是二次的。
-
-
可以看到,对于个类别,在投影曲线方向上,可能要次一元多项式才可以解决问题,这意味着如果是维空间,需要阶,也就是 项多项式和交叉积才可以解决。
-
一个例子:
-
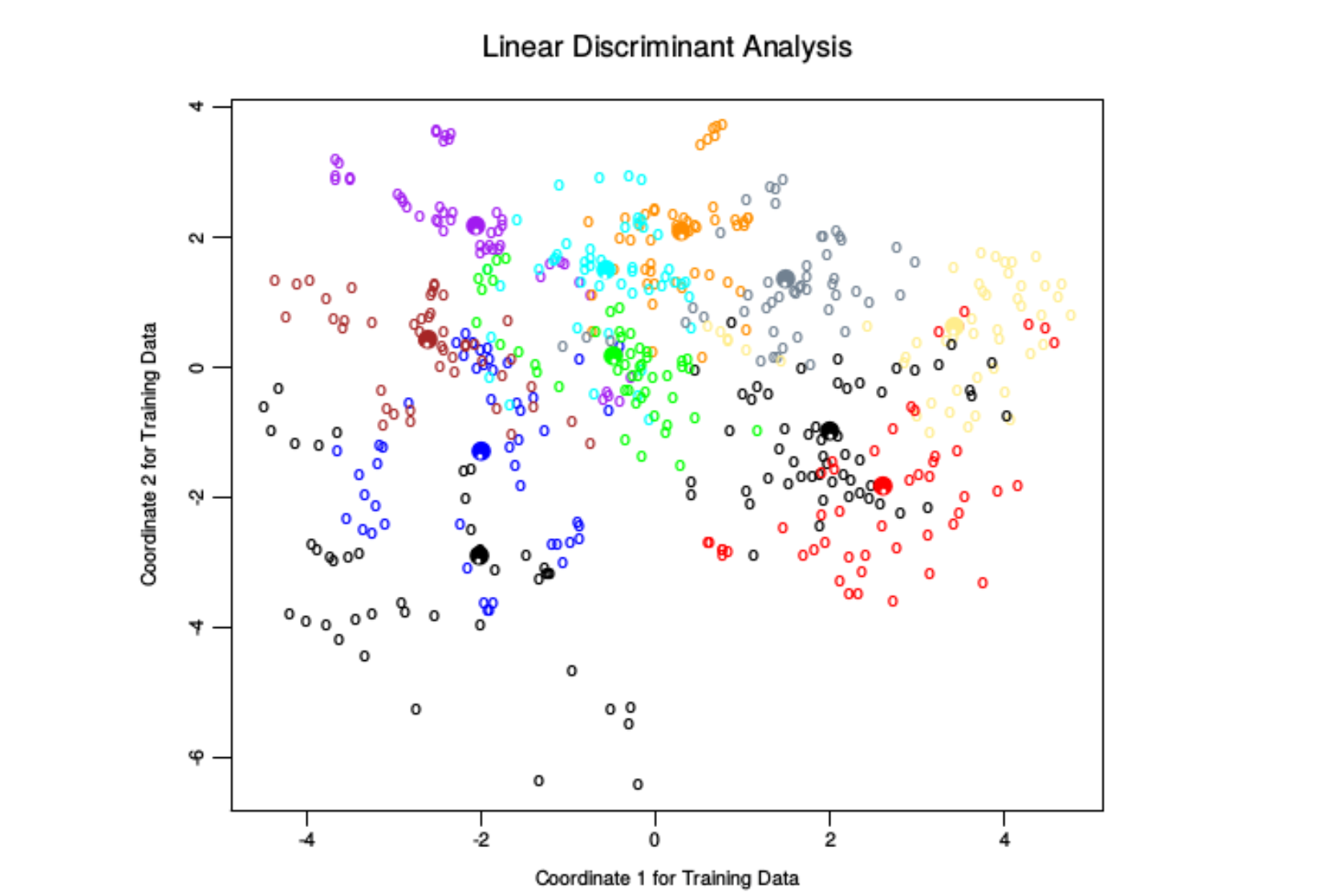
下图是一个元音训练数据的二维图像,其在维空间有个类别。颜色深的圆圈是每个类的投影均值向量,这些类的重叠度很高。
-
其中有3个维度,通过主成分分析可以解释90%的方差,下表是一些算法结果,可以看到线性回归被掩盖破坏
